
 Imprimir
Imprimir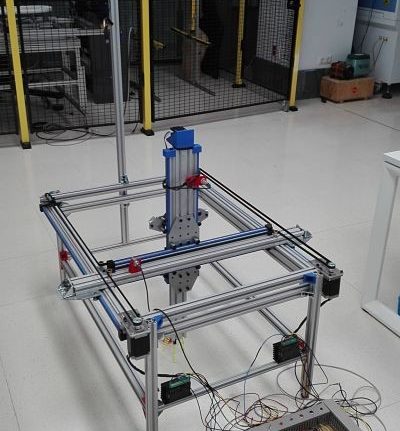
Ficha proyecto IVACE
Título
Desarrollos robóticos de bajo coste para sectores manufactureros

Resumen
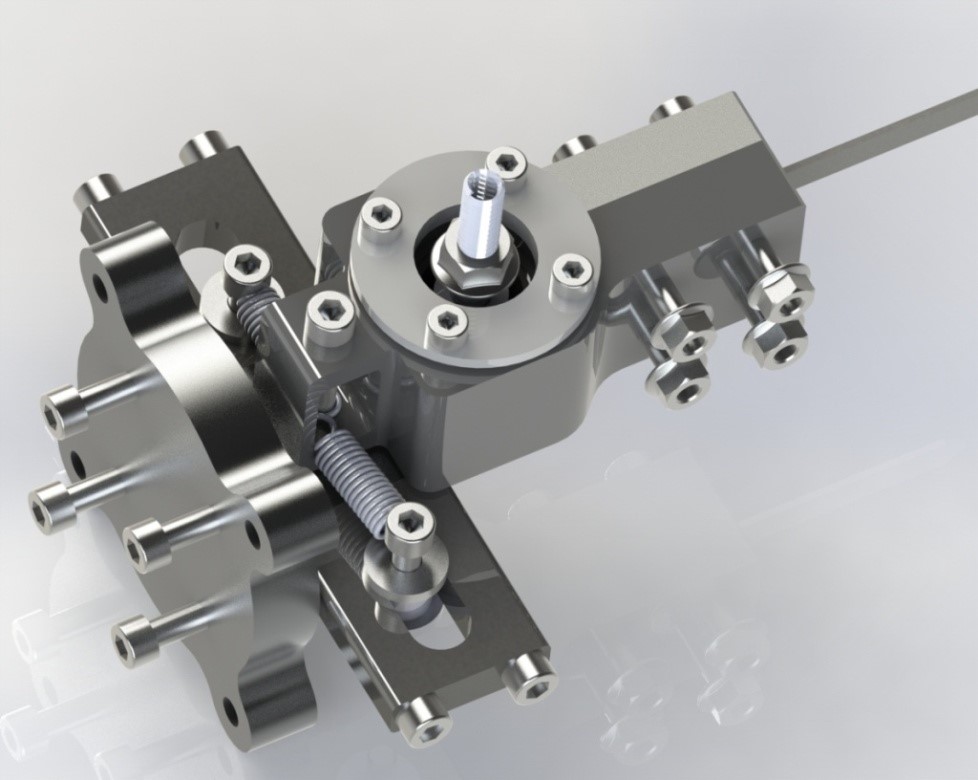
El objetivo principal de este proyecto es desarrollar robots de bajo coste para su utilización en la automatización de procesos manufactureros del sector del juguete, dedicados a la fabricación de piezas de plástico termoconformadas mediante procesos de soplado y/o rotomoldeo, u otros sectores similares. El desarrollo de estos robots pretende ofrecer soluciones de automatización fiables para su introducción en sectores que actualmente siguen teniendo muchas dificultades técnicas y económicas a la hora de automatizar procesos que tradicionalmente se han realizado de forma manual por dos motivos fundamentales: - No existen desarrollos de sistemas para automatización y robotización que cubran las necesidades del sector. - O los sistemas existentes en el mercado tienen un coste excesivamente elevado y no cumplen los requisitos necesarios al 100%. Estos robots de bajo coste estarán orientados a la automatización de procesos secundarios en los que no es posible justificar la inversión inicial que supone la automatización de procesos mediante el uso de robots industriales convencionales, por el elevado coste de estos. Asimismo se pretende continuar con el desarrollo de líneas anteriores en las que se ha venido trabajando en el desarrollo de tecnologías de sensorización y herramientas que permitan establecer entornos de trabajo colaborativos hombre-máquina orientados a la automatización de procesos de desbarbado de piezas de plástico. Partiendo de los resultados del proyecto ROBINT, proyecto en colaboración y financiado por IVACE en la anualidad 2016, se pretende seguir avanzando en la línea marcada por los resultados obtenidos en el mismo. En dicho proyecto se ha logrado la implementación de una planta piloto que actualmente se encuentra en un estado TRL5, y con el desarrollo planteado en esta anualidad se pretende seguir evolucionando la planta piloto hasta alcanzar al menos un TRL6. Para ello se plantea el desarrollo de nuevos sistemas de escaneado, que permitan digitalizar y extraer la información para generación de trayectorias de un robot antropomórfico en tiempo real para realizar procesos de desbarbado o mecanizado de piezas de plástico fabricadas mediante el uso de procesos de soplado o rotomoldeo. Asimismo se plantea la evolución o desarrollo de nuevas herramientas que permitan dotar al sistema de mayor flexibilidad a la hora de realizar los procesos de desbarbado y mecanizado.
Resultados
Con la ejecución del proyecto se espera implementar una celda robótica para tratamiento de superficies y mecanizado, que permitan la automatización de procesos de fabricación con materiales termoplásticos. En el marco del proyecto se llevarán a cabo los siguientes desarrollos: • Desarrollo de robot cartesiano de bajo coste. • Desarrollo de sistema de escaneado de superficie y generación de trayectorias. • Desarrollo de herramientas para manipulación y tratamiento de piezas. • Desarrollo de algoritmos de control para procesos de desbarbado.
Áreas de conocimiento y líneas tecnológicas
Sectores de aplicación
1
Tecnologías electrónicas
Procesos industriales
Proyecto financiado por