
 Imprimir
Imprimir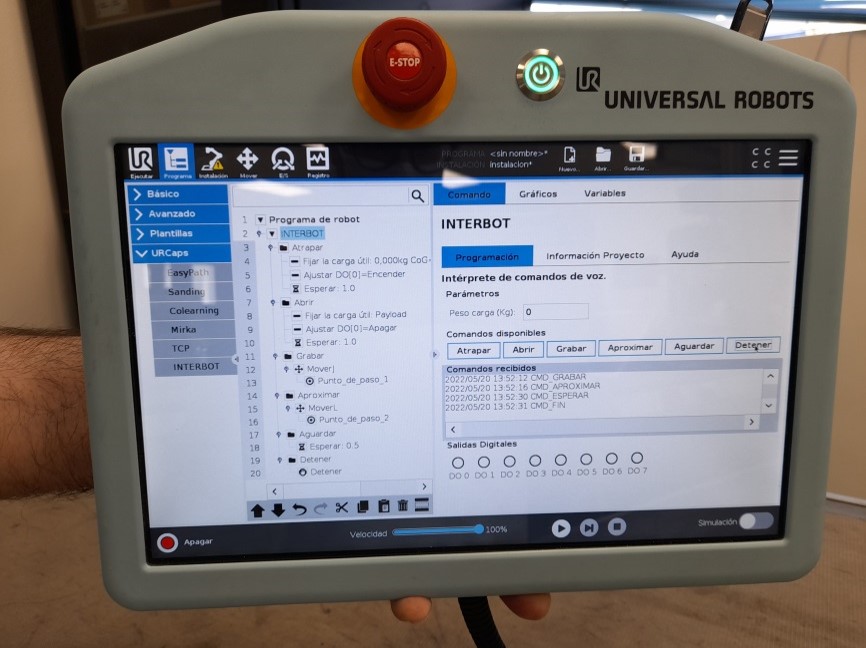
Ficha proyecto IVACE
Título
Desarrollo de una interfaz HMI para la programación de robots mediante comandos verbales y visión artificial

Resumen
Las tendencias hacia la fabricación de una amplia variedad de productos en tamaños de lote cada vez menores (personalización de producto) implica la necesidad de reajustar con mucha frecuencia los medios productivos a cada tipo de producto. Aunque los robots son equipos muy flexibles, su eficiencia disminuye si se requiere reprogramarlos continuamente para adaptarse a las especificaciones de cada nuevo producto. El desarrollo de interfaces que permitan la rápida reprogramación de un robot, y en la medida de lo posible de forma casi intuitiva por personal no especializado, es una opción que se está abordando desde diversas perspectivas. Este tipo de interfaz es especialmente importante en entornos donde la presencia humana es importante, tales como las industrias manufactureras. Por ello, el objetivo del proyecto es desarrollar una interfaz de programación de robots colaborativos, basada en el reconocimiento y la ejecución de comandos verbales por parte del robot en un ambiente industrial, a partir de los cuales se pueda generar una secuencia de programación de movimientos y su grabación en el controlador. OBJETIVOS En este proyecto se plantea como objetivo general el desarrollo de una interfaz HMI avanzada, que permita programar robots colaborativos mediante el reconocimiento de comandos verbales en entornos industriales, a partir de los cuales se pueda generar una secuencia de programación de movimientos y su grabación en el controlador. Este proceso estará apoyado por un sistema de visión artificial que facilitará el ajuste fino de movimientos y la identificación de objetivos (piezas/elementos). El sistema desarrollado integrará los elementos de seguridad suficientes para que no exista riesgo de colisiones indebidas o accidentes inesperados. Los objetivos específicos son: • Desarrollar un sistema de reconocimiento de palabras y frases, que pueda interactuar con el control del robot incluso en entornos industriales. • Integrar un sistema de visión artificial 3D para reconocimiento de formas, que combinado con el sistema de órdenes verbales permita ajustar movimientos del robot • Desarrollar un proceso de programación y repetición de movimientos en el controlador del robot a partir de las órdenes verbales e imágenes. • Desarrollar un sistema de seguridad robusto e integrarlo en el proceso de programación. • Construir una interfaz intuitiva que integre los desarrollos anteriores y facilite las tareas de programación. • Desarrollar un proyecto piloto demostrativo • Transmitir el conocimiento adquirido a las empresas interesadas.
Resultados
El resultado del proyecto INTERBOT es un sistema de programación de robots UR por comandos verbales con los siguientes beneficios: Método de programación fácil e intuitivo. Rapidez a la hora de generar un programa de robot funcional. Ergonomía y comodidad a la hora de grabar y definir trayectorias. No hay que llevar la tablet en la mano. El usuario tiene las manos libres. Democratización de la actividad de programación de robots. Cualquier operario, sin conocimientos previos de programación puede aprender a realizar sus propios programas de robot.
Áreas de conocimiento y líneas tecnológicas
Sectores de aplicación
1
Tecnologías y sistemas de monitorización, seguimiento y control de procesos industriales
L1 - Monitorización de procesos industriales
2
Tecnologías de diseño
L1 - Accesibilidad (diseño orientado a las personas)
L2 - Metodologías de diseño orientado a las personas
L3 - Usabilidad (diseño orientado a las personas)
3
TICs
L1 - Sensores
L2 - Semántica
L3 - Metodologías de desarrollo
L4 - Metodologías de implantación y despliegue
L5 - Redes de sensores
4
Tecnologías electrónicas
Procesos industriales
Proyecto financiado por